| Meet Dingo Your Open Source Four-Footed Friend |
| Written by Lucy Black | |||
| Sunday, 25 June 2023 | |||
|
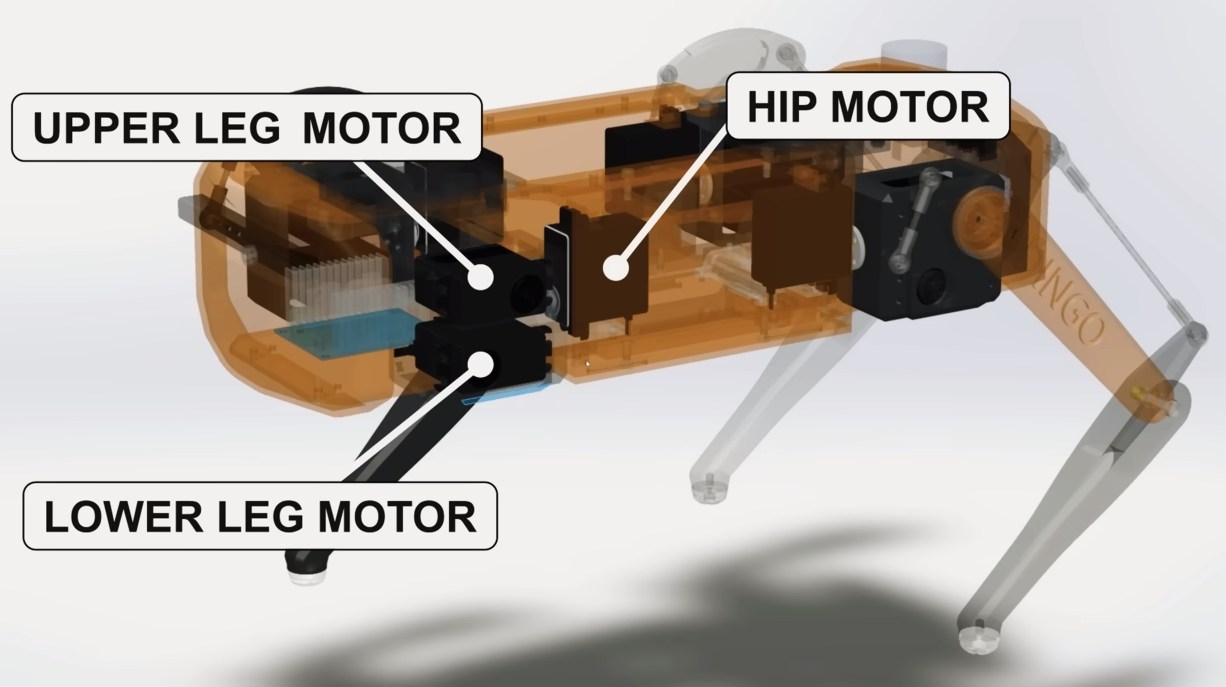
Dingo is a quadruped robot, from Australia, intended for research and educational purposes. Dingo resembles Boston Dynamics' Spot but at a small scale and a tiny fraction of the price. With a 3D-printed body and a Raspberry Pi as its computer, it is fully open source and well-documented to allow you to fork it. The Dingo was created as a capstone engineering project for the Bachelor of Robotics and Mechatronics Engineering at Monash University by students Nathan Ferguson and Alexander Calvert. Their video formed part of the project's formal assessment, which explains its lack of hype. It does, however, give a good overview of the project, starting from why we need yet another robot dog. The motivation for Dingo, as explained by Nathan Ferguson was that the options for students wanting to do research with quadruped robots are that they are either too expensive (referring specifically to Boston Dynamics' commercially available Spot robot which cost nearly $75,000 when launched in 2020), too small (for example, Mini Pupper at 209 mm long by 109 mm wide by 165 mm high and weighing in at 560 grams or the similarly sized SpotMicro) or not aesthetically pleasing (for instance, the Stanford Pupper). According to Alexander Calvert the goals for Dingo were to make it affordable (less than $1500 Australian dollars equivalent to less than $1,000 US dollars), robust, expandable for research purposes and aesthetically pleasing. In terms of size Dingo is around 380 mm long by 250 mm wide and stands 250 mm high and weighs around 3 kg, making it easily portable 560 grams. Controlled by a PlayStation controller or the keyboard of a remote computer, Dingo can walk in any direction with a top speed of 30 centimetres per second and has a payload capacity of up to 50 grams making it suitable for carrying additional sensors and actuators for research purposes. Like Stanford Pupper and Mini Pupper, Dingo's central computers is a Raspberry Pi running Ubuntu and it also has an Ardinuino Nano to control analog sensors and extra peripherals. It can be powered by lithium batteries allowing it to be continuously operated for a least 25 minutes. The motors are the most expensive part of the robot as three are required for each leg, making a total of 12. According to Nathan one of the benefits of the design of Dingo over some others is the unique placement of the motor. A mechanical linkage allows two motors to be placed on top of each other reducing the risk of limb collision. In addition to the physical robot the students also built a simulation of it using Gazebo, the open source 3D robot simulator. As well as being used to test changes to the robot's control algorithm and different patterns of walking, this simulation could be provide a testing ground for teaching the robot to remain stable over rough terrain. A costed Bill of Materials, including links to suppliers, can be downloaded from the project's GitHub repo where you'll also find the code. The repo also includes a gazebo simulation of the Dingo, based on URDF file and meshes which are also provided. The 3D CAD files for this aesthetically pleasing robot are available at GrabCAD.
More InformationRelated ArticlesMini Pupper On Kickstarter (2021) Now We Can All Build A SpotMicro (2020) Stanford Doggo - The Quadruped For The Rest Of Us Spot The Robot Dog Learns New Tricks Spot Is Boston Dynamics' New Robot "Dog" To be informed about new articles on I Programmer, sign up for our weekly newsletter, subscribe to the RSS feed and follow us on Facebook or Linkedin. 
Comments
or email your comment to: comments@i-programmer.info |
|||
| Last Updated ( Sunday, 25 June 2023 ) |