| Byrun Walks With Ease |
| Written by Lucy Black | |||
| Sunday, 22 March 2015 | |||
|
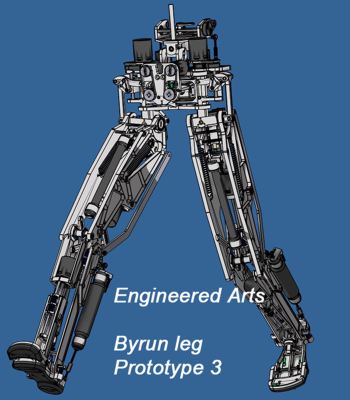
Byrun is a full-sized humanoid robot under development at Engineered Arts, Byrun's special feature is that is designed to reproduce human movement. This video shows Byrun walking in a convincingly human way. Engineered Arts is best known for RoboThespian, a "communications" humanoid robot designed for human interaction in a public environment and to perform on stage in live theatrical events. Although lifesize and bipedal in that it has legs, with hip and knee joints, RoboThespian is not mobile. Introducing Byrun Will Jackson, Engineered Arts' founder and director, explains that he had long faced the question "Can it walk?". Having full-sized, heavy, mobile robots mixing with humans is inherently dangerous but he decided to take on the challenge: But just walking is not enough. It must run, jump hop and leap. To be worth its cost, this robot must perform like something never seen before. If it can do just 10% of John Travolta's walk, Margot Fonteyn's dance and Julia Roberts' smile, we have a winner. Achieving these goals is a daunting task. It requires not just engineering expertise, but radical and novel approaches to the problems of dynamic balance, actuation efficiency, and locomotion.
The design preview for Byrun was published in 2013, explaining the project's biomimetically driven design rationale is because: The ability to move like a human adds to our ability to communicate with humans. For this reason: Byrun’s proportions, joint locations and actuation ranges are as closely matched to a human model as possible - this is not because we believe that dressing like a bird will make us fly, but because people are acutely sensitive to minor deviations in the human form. We recognise the mood, gender and intention of others from their movement. For a communication robot to do the same, it should adhere closely to a familiar body model. The goal is to be a fluid as possible, to reproduce the biological motion of people. In practical terms this means placing actuators, linkages and ancillaries in biologically analogous positions, finding a compromise between optimum mechanical efficiency and aesthetic acceptability. In response to the question "Why a walking robot?" the fact sheet concludes: ... because you want to see it. Now Engineered Arts has released the fist video of Byrun in action, albeit only from the hips down, and it shows that as far as bipedal locomotion is concerned the humanoid is coming along nicely.
Watching Byrun on the treadmill I envied the robot its easy relaxed gait and could imagine being comfortable taking a stroll with him. This response should be counted as a mark of success as it suggests that Byrun has achieved the biomimetic goal. Like Engineered Arts other products, RoboThespian and the smaller, more affordable, head-and-torso SociBot, Byrun will be available for sale. It is therefore on the road to becoming the first commercial full-size dynamic humanoid robot.
More InformationRelated ArticlesThe Amazing Dr Guero And His Walking Robots REEM-C A Full Size Humanoid Robot You Can Buy!
To be informed about new articles on I Programmer, install the I Programmer Toolbar, subscribe to the RSS feed, follow us on, Twitter, Facebook, Google+ or Linkedin, or sign up for our weekly newsletter.

Comments
or email your comment to: comments@i-programmer.info |
|||
| Last Updated ( Sunday, 22 March 2015 ) |