| The Robot Bartender - A Lesson in Why Robotics Is Difficult |
| Written by Harry Fairhead | |||
| Monday, 25 June 2012 | |||
|
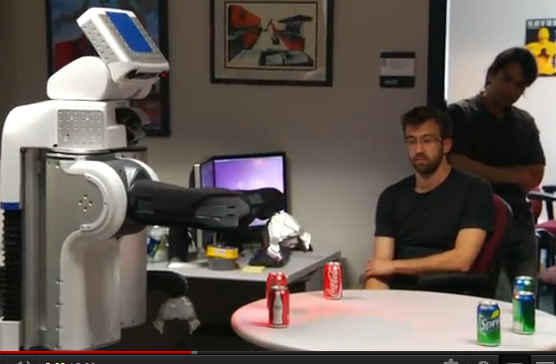
One of the real frustrations of trying to do anything with a robot is that the task always looks so simple. You say, "I just invented a robot bartender" and the usual response is "what took you so long?". For an insight into why it is difficult, take a look at the this video.
This video shows you a Willow Garage PR2 robot attempting to be a robot bar tender. This much is nothing particularly new, and it isn't really a novel application - robots have been serving drinks and trays of snacks since they were steam-driven, or at least relay-driven. What is interesting about this video from the Search-based Planning Laboratory of Carnegie Mellon University is that it explains the difficulties of making the robot do even the simplest jobs. It not just about recognizing where the robot is or what it can pick up - it's a planning problem about how to get an object from one location to another. Watch and discover the trials and tribulations of robotic programming:
You have to say that the current speed of the PR2 is such that you would probably walk out and find another saloon (or coffee shop) before it completed the transaction. On the other hand, do you really want a robot that big zooming about with trays of drinks?
Related ArticlesAldebaran's Humanoid Robot Romeo On Video
Comments
or email your comment to: comments@i-programmer.info
To be informed about new articles on I Programmer, install the I Programmer Toolbar, subscribe to the RSS feed, follow us on, Twitter, Facebook, Google+ or Linkedin, or sign up for our weekly newsletter.

|
|||
| Last Updated ( Monday, 25 June 2012 ) |