| MIT's Robot Cheetah Jumps Over Things In Realtime |
| Written by Harry Fairhead | |||
| Saturday, 30 May 2015 | |||
|
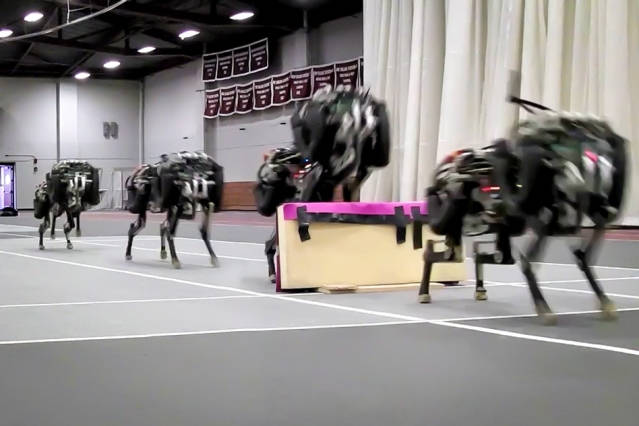
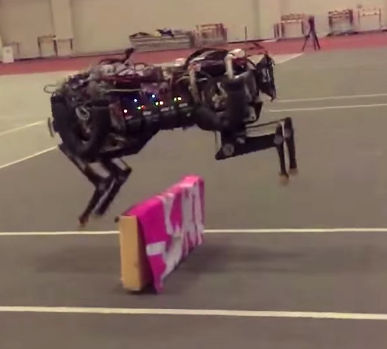
I have to admit that this news item is all about seeing the robot actually do the jumping. So if you are in a hurry watch the video and then read about how and why its important.
If you have watched the video you will have noticed that things happen quickly. This is no x8 replay with the robot having tens of minutes to plan. This is remarkable because it is an example of a robot thinking on its feet - all four of them. While it is true that a quadruped is a particularly stable platform, and therefore the computations don't have to be that good, it is still impressive that it can do it so fast. The robot has to notice the obstacle using its Lidar sensor and immediately start to modify its stride so that it reaches the take off point correctly positioned. Then it uses a planning algorithm to find a feasible trajectory for its limbs and puts it into practice. Even the landing isn't easy if the robot is to continue to run. What is even more surprising is that the computer that does the work is carried by the robot - no WiFi links to a powerful GPU cluster.
The planning only produces a feasible, not an optimal, solution so sometimes the robot jumps a little higher than it needs to - so what? Perhaps many robot tasks could be speeded up if an optimal solution wasn't the goal. It also brings to mind a quote from Animal Farm "Four legs good, two legs bad". The robot cheetah will be on display at the forthcoming DARPA Robotics Challenge and my guess it that it will look fast and stable compared to the teetering two legged humanoid robots actually engaged in winning the challenge.
More InformationMIT cheetah robot lands the running jump Related ArticlesSelling The DARPA Robotics Challenge WildCat Quadruped Leads The Pack To be informed about new articles on I Programmer, install the I Programmer Toolbar, subscribe to the RSS feed, follow us on, Twitter, Facebook, Google+ or Linkedin, or sign up for our weekly newsletter.

Comments
or email your comment to: comments@i-programmer.info |
|||
| Last Updated ( Saturday, 30 May 2015 ) |