| Cubli - A Reaction Wheel Drive Robot |
| Written by Mike James | |||
| Sunday, 29 December 2013 | |||
|
This is such a nice mechanism that you just have to watch as it uses rotating wheels under computer control to convert angular to linear momentum - more simply it can jump up on command and balance. Gyros and rotational motion in general hold a strong fascination for any mechanically minded person, but put them together with some computer control and it gets even more interesting.
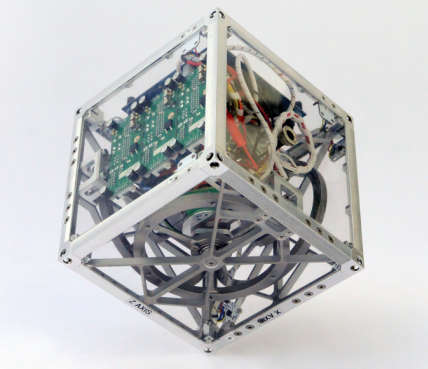
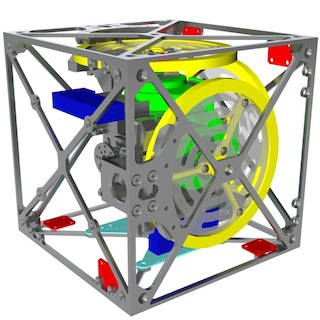
Cubli is a 15x15x15 cm cube with reaction wheels mounted on three faces built at ETH Zurich. The reaction wheels can be rotated up to a high angular momentum and then suddenly stopped to cause Cubli to rotate into a balancing position on an edge or corner. You have to see it in action to appreciate how nice this basic idea is. When you watch the following video take note of how slowly the reaction wheels are revolving when Cubli is balanced. The balance isn't based on gyroscopic action, but on a feedback control using the reaction wheels to apply a torque to stabilize Cubli.
In the case of a gyro you simply spin up a flywheel and the angular momentum generated causes it to keep its initial axis fixed in space. In other words, a gyro is self-stabilising, which is what makes it so useful in things like quadcopters and spacecraft. In this case the reaction wheels only move when needed to supply a torque to counteract any force that would alter Cubli's orientation. In other words, this is software-stabilized. Cubli can "walk" by combining its jumping up, balancing and controlled falling behaviors. Notice that all of this is possible courtesy of good old friction. When a reaction wheel is spun up to high speed this happens slowly so that Cubli stays put - held in place by friction. When the wheel is suddenly decelerated the torque on Cubli overcomes friction and it rotates. If you tried the same trick while Cubli was floating in orbit, say, then the result would be very different in that every rotation of a reaction wheel in one direction would cause Cubli to rotate in the opposite direction. This would make Cubli's walking strategy completely ineffective - which is sad because if it did work you would have a reactionless propulsion system that would take us to the stars. But in space no-one can watch Cubli walk. More Informationhttp://www.idsc.ethz.ch/Research_DAndrea/Cubli Nonlinear Analysis and Control of a Reaction Wheel-based 3D Inverted Pendulum (pdf)
Related ArticlesROSPHERE - A Hamster Ball Robot Google's Schaft Wins DARPA Robotics Challenge DARPA'S ATLAS Robot Needs A Brain
To be informed about new articles on I Programmer, install the I Programmer Toolbar, subscribe to the RSS feed, follow us on, Twitter, Facebook, Google+ or Linkedin, or sign up for our weekly newsletter.
Comments
or email your comment to: comments@i-programmer.info

|
|||
| Last Updated ( Sunday, 29 December 2013 ) |