| ROS (Robotic Operating Systems) Everywhere! |
| Written by Frank Tobe |
| Saturday, 17 September 2011 |
|
Willow Garage's ROS (Robotic Operating System) provides a collection of software libraries and tools to help software developers create robot applications. Now it looks as if it might be making the transition from academia and experiments to commercial systems. This might mean, in the near future, a single platform for all robotics.
Willow Garage's ROS (Robotic Operating System) provides a collection of software libraries and tools to help software developers create robot applications. ROS provides device drivers, visualizers, message-passing, package management, and advanced libraries to help application engineers understand camera, video and 3D data.
Pieter Abbeel, leader of a research team at
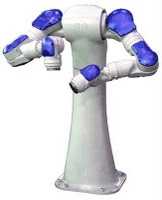
ROS is open source and free to use, change and commercialize. The system is used by a growing number of popular personal service and research robots including one at the University of California in Berkeley (pictured above) that learned how to process a basket of laundry from washing to folding. Gerkey believes ROS will allow entrepreneurs to create new commercial applications for robots even if they don't have extensive robotics expertise. Brian Gerkey (Willow Garage) said in the write-up about his MIT Technology Review TR 35 award, "The goal [of ROS] is to help people who have ideas for what robots can do in the marketplace by providing a common language for robots." The industrial robotics industry is confronted today with the modification of production processes due to the trend toward individualization of consumer products. This requires that handling of robots be much easier, with greater flexibility and rapidity, and that accuracy has to be increased. Thus it was a big leap forward last week when Yaskawa America's Motoman Robotics Division signed a collaboration agreement with the Southwest Research Institute (SwRI) to port Willow Garage's ROS to the Motoman line of industrial robots. This is the first authorized porting of ROS to an industrial robot. SwRI plans to develop, demonstrate and release to the open-source community an interface between Motoman robots and ROS thereby taking this award-winning software beyond the realm of universities and research and into the world of business.
Motoman
SwRI (Southwest Research Institute) is an independent, nonprofit, applied research and development organization based in San Antonio, Texas, with more than 3,000 employees and an annual research volume of more than $500 million. Yaskawa America Motoman Robotics division offers arc welding robots, spot welding robots, painting robots, handling and other robots. It's most recent two-armed handling robots are being implemented in the automotive industry in Germany and Japan. W. Clay Flannigan, Manager of the Robotics and Automation Engineering Section of SwRI, said: "We are working to build a general purpose interface between the broad manipulation and perception capabilities of the ROS framework and the highly reliable architecture of industrial robots. We plan to implement the interface at a low-level within the existing robot controller that enables the capabilities of the ROS manipulation stack, while maintaining the safety inherent in the industrial controller. By providing the solution as open source, we hope to build a community around the use of ROS in a wide variety of industrial applications. Ideally, the community will expand to encompass more robots, sensors and industrial controllers, and we hope to contribute to the process. We plan to release the source in the first quarter of 2012." Erik Nieves, Technology Director for Yaskawa America's Motoman Robotics Division, explained why Yaskawa America is pursuing an open source controller interface for it's Motoman line of robots: "Yaskawa's strategy is to offer many controllers for the many different audiences and applications that our robots address. This ROS adaption is in line with that strategy." The next step for industrial robotics is to be more sensor aware; to be able to accommodate the many new capabilities showing up in the service sector. It's clear that ROS is able to handle all of these and it saves our programming department from writing drivers for each and every possible configuration. We want ROS for these next generation devices which will come first to ROS. A near-term goal of the project is to demonstrate advanced material handling solutions that leverage the path planning, grasp planning, and perception frameworks within ROS to enable robotic solutions that would be difficult or expensive with current solutions. One can only imagine the longer-term future. Perhaps ROS could become the universal robot controller that most end users wish for. Perhaps the days of the clunky teaching pendant will soon be replaced by an iPad or tablet running an ROS applet. Willow Garage's CEO Steve Cousins, in addition to providing the colorful title to this article ("ROS Everywhere!"), commented on the import of the SwRI Motoman ROS porting project. He explained that current-day industrial robots often don't need the extensive vision, mobility and navigation capabilities available in the growing world of service robotics. But vision and navigation systems are the next level in the evolution of industrial robotics as they branch out of the automotive industry and into all the other areas of production and material handling, and ROS is a good entry system to program, simulate and implement these new industrial and material handling applications using all the new navigation and vision features. Yaskawa's Motoman line of robots will, by using ROS, at no significant research cost on the software side, be able to add features to their existing robot manipulators enabling them to compete in terms of handling new manufacturing processes. ROS and Willow Garage are getting a boost to the credibility of ROS by this very real and timely proof of concept. Also getting a big boost are the many industrial integrators who add a wide range of industrial expertise to the ROS community thereby making both groups stronger.
Guest article by Frank Tobe, publisher of The Robot Report an online magazine specializing in the business of robotics.
More Infomation
|
| Last Updated ( Saturday, 17 September 2011 ) |