| Is Agile Justin The Most Capable Robot Yet? |
| Written by Lucy Black | |||
| Saturday, 21 June 2014 | |||
|
The German Aerospace Center (DLR) built Rollin Justin in 2009 and it evolved into a fast and capable robot. Its latest variant, Agile Justin, has just received an upgrade and it can do even more impressive things. Rollin Justin could catch things reasonably accurately ,but Agile Justin's mechatronics have been upgrade so that it can throw things. Later in the video explaining how it all works you can see Rollin and Agile play a game of catch.
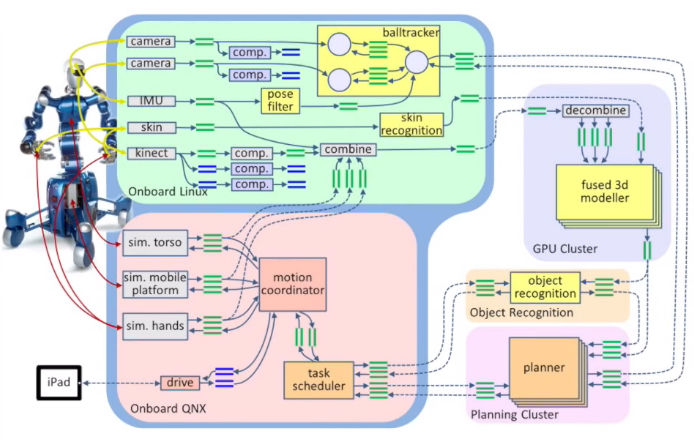
It can see the ball and its surrounding using a depth sensor and a 24,000 core GPU cloud. The raw data are processed using something like the Kinect Fusion program to create a realtime model accurate to 2mm. Coupled with a planning algorithm and object recognition, the depth map makes it possible for Justin to carry out complex movements and procedures.
Another amazing feature is the 1500 taxel touch senor built into each hand. With a 2mm resolution this is sufficient for the robot to tell what something is made of from its surface texture. Take a look at the video to see the systems in action and look out for the strange push button calibration near the end where the robot uses its own hand to align its cameras. Yes, it does look like self-absorbed introspection.
You can't help but wonder why this robot isn't part of the ongoing DARPA Robotics Challenge?
More InformationRelated ArticlesPepper - Aldebaran's New Robot Designed To Be Your Friend Ultra-fast Robot Catches On The Fly Google Refuses DARPA Money But Still In Competition Google's Schaft Wins DARPA Robotics Challenge
To be informed about new articles on I Programmer, install the I Programmer Toolbar, subscribe to the RSS feed, follow us on, Twitter, Facebook, Google+ or Linkedin, or sign up for our weekly newsletter.

Comments
or email your comment to: comments@i-programmer.info
|
|||
| Last Updated ( Friday, 20 June 2014 ) |