| GimBall - a Crash-Happy Robot |
| Written by Harry Fairhead | |||
| Saturday, 02 November 2013 | |||
|
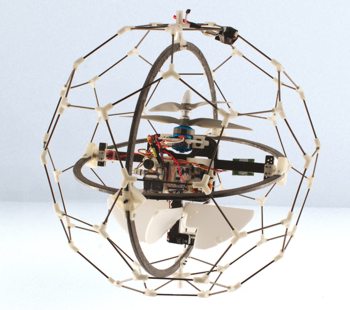
GimBall is a robot that is isn't deterred by bumping into obstacles. After any collision it just carries on flying. This gives it a useful role in complex and chaotic environments. See it in action flying through a forest. GimBall is the latest robot from the the Laboratory of Intelligent Systems at the Ecole Polytechnique Federale De Lausanne (EPFL). It is the the stablemate of AirBurr (see our earlier report) and like it has been designed to mimic the way insects bounce off the obstacles they encounter. This eliminates the need for fragile sensors to detect objects and avoid collisions in the first place.
As Adrien Broid explains in the video clip GimBall is equipped with a rotating frame round an inner frame that always remain stable even when there are collisions. This gives it the potential to be deployed into very difficult environments for search and rescue missions. To test the robot, Briod specified a compass direction and set it off to fly through a forest. Despite bumping into multiple trees it completed a course of several hundred metres. In the video Gimball flies into the hands of Przemyslaw Mariusz Kornatowski, the engineer on the team, who explains the design issues related to weight and balance and how carbon fibre was chosen for its construction. The result is a robot and is lightweight and robust. It doesn't need complex sensors for obstacle avoidance - in fact colliding with obstacles can even be used to guide it. It seems the team is another step forward on the road to reproducing the amazing capabilities of insects.
|
 More Information
More Information

Microsoft Announces Hyperlight Wasm 01/04/2025 Microsoft has released Hyperlight Wasm, a Hyperlight virtual machine (VM) "micro-guest" that can run Wasm component workloads written in many programming languages. |
Programming Jobs - Going, Going, Gone 28/03/2025 In the USA, more than a quarter of programming jobs have vanished in the past two years, something that is blamed on AI. Is this going to get worse? Are all our jobs at risk? |
More News
|