| Mapping in the Cloud with Rapyuta |
| News | |||
| Written by Harry Fairhead | |||
| Saturday, 15 June 2013 | |||
|
Mapping is widely considered the most difficult perceptual problem in robotics, both from an algorithmic but also from a computational perspective. An innovative way around the problem relies on Rapyuta, the RoboEarth Cloud Engine. A video from a team at ETH Zurich shows full 3D mapping in real time being performed by an inexpensive, lightweight Turtlebot. Instead of the computation being done locally it is offloading it using Rapyuta, the RoboEarth Cloud Engine.
As depicted in the diagram below, the robot is equipped with an RGBD sensor (ASUS Xtion PRO), an ARM-based single board computer (Odriod-U2), and an off-the-shelf wireless dongle. The robot transmits RGB images (QVGA resolution) and depth images (QVGA resolution) at 30 FPS to Rapyuta with a frame by frame compression (JPEG for RGB, and PNG for depth images). The single board computer is therefore only used for compression, communication, and low-level control of the robot. The computation is performed in Ireland, courtesy of Amazon Web Services.
RoboEarth has been described as "the web for robots" uploading and downloading information to a knowledge base. Rapyuta, also known as the the RoboEarth Cloud Engine, was launched in February with the aim of enabling robots to offload heavy computation by providing secured customizable computing environments in the cloud.
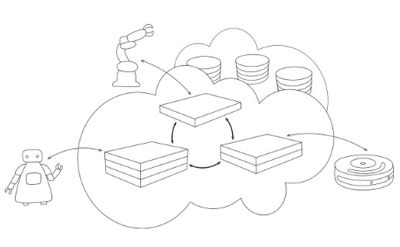
Rapyuta is an open source Platform as a Service framework built on a clone based model. As shown in the diagram each robot connected to Rapyuta will have a secured computing environment (rectangular boxes) giving them the ability to move their heavy computation into the cloud. In addition, the computing environments are tightly interconnected with each other and have a high bandwidth connection to the RoboEarth knowledge repository (stacked circular disks). This video gives more idea of how Raputa is intended to increase robot performance using the computational, storage, and communications infrastructure provided by data centers:
More InformationRelated Articles
To be informed about new articles on I Programmer, install the I Programmer Toolbar, subscribe to the RSS feed, follow us on, Twitter, Facebook, Google+ or Linkedin, or sign up for our weekly newsletter.
Comments
or email your comment to: comments@i-programmer.info

|
|||
| Last Updated ( Friday, 14 June 2013 ) |