| CHARLI-2 Scores at RoboCup 2011 |
| Tuesday, 12 July 2011 | |||
|
The coveted Louis Vuitton Cup for the champion team in the Humanoid League of the 2011 RoboCup, for soccer- playing has been won by a US team for the first time. The Humanoid League became part of the RoboCup in 2002 and its trophy ever since has been a crystal globe crafted by Baccarat presented in a custom-made Louis Vuitton Monogram canvas hard case with a red lining.
After this year's contest held in Instanbul from 7-11 July Virginia Tech emerged victorious in both the KidSize and AdultSize leagues. In the KidSize competition teams consist of of three 30-60 cm high robots and the DARwin-Op model designed by Denis Hong from Virginia Tech's Robotics and Mechanisms Laboratory (RoMeLa) in conjunction with collaborators at University of Pennsylvania's Grasp Lab, Purdue University, and Korean company Robotis measures just 455 mm (17.9 inches) and has 20 actuator modules. Both its hardware and software are open source.
The AdultSize contest isn't about team work. Instead individual robots between 130-160cm compete with their skills for dribbling, kicking, throw-ins etc. CHARLI-2 is 4 foot 7 inches.
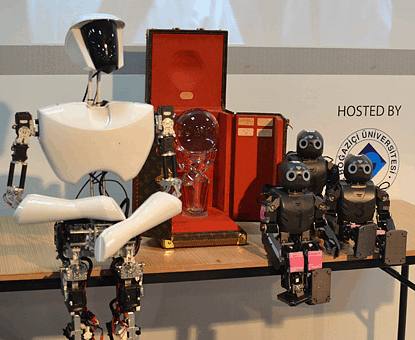
CHARLI-2 and the DARwIn-OP team with the Louis Vuitton Humanoid Cup (Source Spectrum.ieee.org)
In the Teen Size (100-130cm) competition there are two robots on each team and this years winners were Team Nimbro from Germany. The other Humanoid League in the competition is the referred to as Standard Platform in which teams of identical Nao robots manufactured by Aldebaran Robotics play a very cute game in which software is key. In the all-German final B-Human beat Nao Devils 11-1.
Nao robots play StandardPlatform final.
KidSize finals DARwin v CIT Brains
AdultSize finals CHARLI v Dutch Robotics
Although the idea of a humanoid robot team taking on and beating the world's best human players seem a remote one, I reckon that by the target date of 2050 enough progress will have been made for this to be realized. More information:Related news:New Nao robot and $15 million investment Aldebaran to open source Nao robot If you would like to be informed about new articles on I Programmer you can either follow us on Twitter or Facebook or you can subscribe to our weekly newsletter.

|
|||
| Last Updated ( Tuesday, 16 February 2016 ) |