| Mechanical Insects Evolve The Ability To Fly Though A Window |
| Written by Harry Fairhead | |||
| Sunday, 07 December 2014 | |||
|
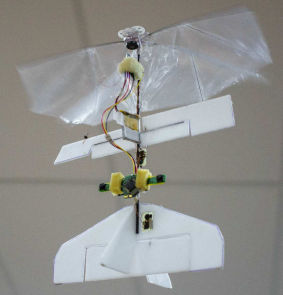
You might think that the world has enough insects without creating robots in the same style. In this case, however, the real interest is in the way the ability to fly though a window can evolve without anyone really trying. This particular robot, DelFly, is a miracle of miniaturisation. It weighs just 20 grams including a 1-gram autopilot and 4 grams devoted to a stereo vision system. It was designed at the Delft University of Technology in the Netherlands. The idea was to try to evolve behavior that would get the autonomous system to fly though a window all on its own. This involves finding the window and working out a flight configuration that gets DelFly though the window. What is remarkable is that, even though the processing power is limited ,the DelFly can use stereo vision to construct a depth field. Each camera is set to a resolution of 128×96 pixels. The cameras are spaced 6 cms apart to provide a good stereo image from which the LongSeq algorithm can extract a depth field, which is used to avoid collisions and allow the DelFly to fly autonomously.
A composite showing DelFly going though the test window
Rather than using a neural network approach, which isn't really suitable for the genetic algorithm,. the control program was represented as a behavior tree - essentially a tree of subtasks and the conditions for them to be executed. The tree served as the genetic information for the individuals in the population. An initial population was created at random and then tested in simulated environment. Each individual was rated on their success and a fitness value computed. The best individuals are used to create a new generation by crossover and mutation. After 150 or more generations the behaviour tree proved about 88% successful which should be compared to an 82% success rate for a hand-crafted tree. The evolved tree was also much smaller, at a depth of 8 compared to 26. After the simulation it was time to move on to the real thing. This is where things didn't go quite according to plan. The real DelFly was more nimble than the simulated drone. Then there were drafts to contend with. Watch the video to see it in action:
After some tweaking, the genetic behaviour trees achieved a 54% success rate compared to 46% for the custom design. Not bad but the gap between the simulation and reality is larger than you might like - unless you really don't want metal insects flying though your window. The team is working on improving the performance so you are not really safe just yet.
More InformationBehaviour Trees for Evolutionary Robotics Kirk Y.W. Scheper, Sjoerd Tijmons, Coen C. de Visser, Guido C.H.E. de Croon Related ArticlesIntroduction To The Genetic Algorithm Software Stops Quadcopters Falling Nano Quadcopter - Your Personal Flying Robot Flying Neural Net Avoids Obstacles
To be informed about new articles on I Programmer, install the I Programmer Toolbar, subscribe to the RSS feed, follow us on, Twitter, Facebook, Google+ or Linkedin, or sign up for our weekly newsletter.

Comments
or email your comment to: comments@i-programmer.info |
|||
| Last Updated ( Sunday, 07 December 2014 ) |